Avfs: An On-Access Anti-Virus File System
Yevgeniy Miretskiy, Abhijith Das, Charles P. Wright, and Erez Zadok
Stony Brook University
1
Abstract
Viruses and other malicious programs are an ever-increasing threat to
current computer systems. They can cause serious damage and consume
countless hours of system administrators' time to combat.
Most current virus scanners perform scanning only when a file is
opened, closed, or executed. Such scanners are inefficient because
they scan more data than is needed.
Worse, scanning on close may detect a virus after it had already been
written to stable storage, opening a window for the virus to spread
before detection.
We developed Avfs, a true on-access anti-virus file system
that incrementally scans files and prevents infected data from being
committed to disk.
Avfs is a stackable file system and therefore can add virus detection
to any other file system: Ext3, NFS, etc.
Avfs supports forensic modes that can prevent a virus from reaching
the disk or automatically create versions of potentially infected files to
allow safe recovery. Avfs can also quarantine infected files on disk and isolate
them from user processes.
Avfs is based on the open-source ClamAV scan engine, which we
significantly enhanced for efficiency and scalability.
Whereas ClamAV's performance degrades linearly with the number of
signatures, our modified ClamAV scales logarithmically.
Our Linux prototype demonstrates an overhead of less than 15% for
normal user-like workloads.
1 Introduction
Viruses, worms, and other malicious programs have
existed since people started sharing files and using network
services [15,3].
The growth of the Internet in recent years and users' demand for more
active content has brought with it an explosion in the number of virus
and worm attacks, costing untold hours of lost time.
Organizations report more financial losses from viruses than from any
other type of attack-reaching well into the millions
[16].
Once infected, original file content may not be recoverable. Viruses
can transmit confidential data on the network (e.g., passwords)
allowing an attacker to gain access to the infected machine.
System administrators must clean or reinstall systems that are not
adequately protected.
A virus's propagation wastes valuable resources such as network
bandwidth, disk space, and CPU cycles. Even if a site is not infected
with a virus, its servers can be overloaded with probes.
The most common countermeasure to malicious software is a virus
scanner.
Virus scanners consist of two parts: a scanning engine and a
component that feeds the data to the scanning engine.
The scanning engine searches for virus signatures, or small
patterns that uniquely identify a virus. Virus signatures should
ideally be kept short so that scanning is more efficient, but at the
same time they should be long enough to ensure that there are very few, if
any, false positives.
A virus scanner can either scan interactively or transparently. An
interactive scanner allows a user to request a scan of a specific file
or directory. Since this process is cumbersome, most virus scanners
also transparently scan files by intercepting system calls or using
other operating-system-specific interception methods.
Currently, most transparent scanners only scan files when they are
opened, closed, or executed.
Consider the case where a Linux file server exports NFS or CIFS
partitions to other machines on the network. Suppose the file server
has a virus scanner that scans files when they are closed. Client
A could create a file on the server and then write the
virus. Suppose that before A closes the file, client B
opens this file for reading. In contrast to Windows, Linux does
not implement mandatory file locking. There is nothing that prevents
B from reading and executing the virus. Even if the file server
scans files both when they are opened and closed, B could still
execute the virus before it is detected as follows: (1) A writes part of the virus,
(2) B opens the file at which point the file is scanned, but no
virus is found, (3) A completes writing the virus, (4) B reads the
rest of the virus before A closes the file. Virus scanners that scan
files when discrete events occur, such as openor close, leave a window
of vulnerability between the time that the virus is written and the time
when detection occurs.
Additionally, because the entire file must be scanned at once, performance can suffer.
On-access scanning is an improvement over on-open,
on-close, and on-exec scanning.
An on-access scanner looks for viruses when an application reads or
writes data, and can prevent a virus from ever being written to disk.
Since scanning is performed only when data is read, as opposed to when
the file is opened, users are not faced with unexpected delays.
We have developed a stackable file system, Avfs, that is a true
on-access virus scanning system.
Since Avfs is a stackable file system, it can work with any other
unmodified file system (such as Ext2 or NFS), and it requires no
operating system changes. For example, an Avfs mounted over SMB can protect Windows
clients transparently. In addition to virus detection, Avfs
has applications to general pattern matching. For example, an organization
might want to track or prevent employees copying files containing
the string "Confidential! Do not distribute!".
To reduce the amount of data scanned, Avfs stores persistent state.
Avfs scans one page a time, but a virus may span multiple pages.
After scanning one page, Avfs records state. When the next page is
scanned, Avfs can resume scanning as if both pages were scanned
together.
After an entire file is scanned, Avfs marks the file clean.
Avfs does not scan clean files until they are modified.
Avfs supports two forensic modes. The first mode prevents a virus
from ever reaching the disk. When a process attempts to write a
virus, Avfs returns an error to the process without changing the file.
The second mode does not immediately return an
error to the process. Before the first write to a file is committed,
a backup of that file is made. If a virus is detected, then Avfs
quarantines the virus (no other process can access a file while it is
quarantined), allows the write to go through, records information
about the event, and finally reverts to the original file. This
leaves the system in a consistent state and allows the administrator
to investigate the event.
We have adapted the ClamAV open source virus scanner to work with
Avfs. ClamAV includes a virus database that currently contains
nearly 20,000 signatures.
Our improved scanning engine, which we call Oyster, runs in the
kernel and scales significantly better than ClamAV.
By running Oyster in the kernel we do not incur unnecessary data
copies or context switches.
Whereas ClamAV's performance degrades linearly with the number of
virus signatures, Oyster scales logarithmically.
Oyster also allows the system administrator to decide what trade-off
should be made between memory usage and scanning speed.
Since the number of viruses is continuously growing, these
scalability improvements will become even more important in the
future.
We have evaluated the performance of Avfs and Oyster. Avfs has an
overhead of 14.5% for normal user workloads. Oyster improves on the
performance of ClamAV by a factor of 4.5.
The rest of the paper is organized as follows.
Section 2 outlines the design of our system.
Section 3 details the design of our scanner.
Section 4 details the design of our file system.
Section 5 discusses related work.
Section 6 presents an evaluation of our system.
We conclude in Section 7 and discuss future directions.
2 Design overview
We begin with an overview of Avfs's components and our four main design
goals:
- Accuracy and high-security:
-
We use a page-based on-access virus scanner that scans in real time as
opposed to conventional scanners that operate during open and
close operations. Avfs has support for data-consistency
using versioning and support for forensics by recording malicious
activity.
- Performance:
-
We enhanced the scanning algorithm and avoided repetitive scanning using a
state-oriented approach. Our scan engine runs inside the kernel, which
improves performance by avoiding message passing and data copying between
the kernel and user space.
- Flexibility and portability:
-
We designed a flexible system in which the scanning module is separate from
the file system module. A stackable file system allows for portability to
different environments and works with any other file system.
- Transparent:
-
Our system is transparent in that no user intervention is required and
existing applications need not be modified to support virus protection.
Stackable file systems are a technique to layer new functionality on
existing file systems [19]. A stackable file
system is called by the Virtual File System (VFS) like other file
systems, but in turn calls a lower-level file system instead of performing
operations on a backing store such as a disk or an NFS server. Before
calling the lower-level file system, stackable file systems can modify an
operation or its arguments. The underlying file system could be any file
system: Ext2/3, NFS, or even another stackable file system.
Avfs is a stackable file system that provides protection against viruses.
Figure 1 shows a high-level view of the Avfs
infrastructure. When Avfs is mounted over an existing file system it
forms a bridge between the VFS and the underlying file system. The
VFS calls various Avfs operations and Avfs in turn calls the
corresponding operations of the underlying file system. Avfs performs
virus scanning and state updates during these operations.
Oyster is our virus-scanning engine that we integrated into the Linux
kernel. It exports an API that is used by Avfs for scanning files and
buffers of data. For example, a read from the
Virtual File System (VFS), vfs_read(),
translates into avfs_read() in the Avfs layer. The lower
layer read method (ext3_read()) is called and the data
received is scanned by Oyster.
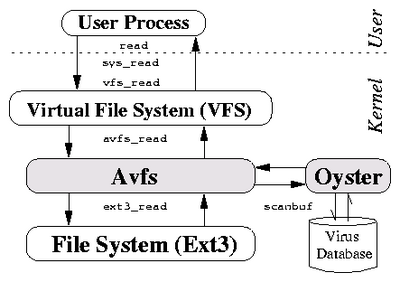 Figure 1: Avfs infrastructure
The relevant file system methods that the stacking infrastructure
provides to us are read, write, open and
close. A page is the fundamental data unit in our file
system. Reads and writes occur in pages, and we perform virus scanning
during individual page reads and writes. This level of granularity
has three key advantages over scanning on open
and close. First, we scan for viruses at the earliest
possible time: before the data from a read is delivered to
the user and before the data from a write propagates to the
disk. This reduces the window of opportunity for any virus attack significantly.
Second, we have an opportunity to maintain the consistency of
file data because we scan data for viruses before data gets
written to disk. Third, with our state implementation we can scan
files partially and incrementally. The state implementation also allows
us to mark completely scanned files as clean so that would not
need to be re-scanned if they are not modified.
In Section 3 we describe Oyster in detail and Section
4 we detail the design of Avfs.
Figure 1: Avfs infrastructure
The relevant file system methods that the stacking infrastructure
provides to us are read, write, open and
close. A page is the fundamental data unit in our file
system. Reads and writes occur in pages, and we perform virus scanning
during individual page reads and writes. This level of granularity
has three key advantages over scanning on open
and close. First, we scan for viruses at the earliest
possible time: before the data from a read is delivered to
the user and before the data from a write propagates to the
disk. This reduces the window of opportunity for any virus attack significantly.
Second, we have an opportunity to maintain the consistency of
file data because we scan data for viruses before data gets
written to disk. Third, with our state implementation we can scan
files partially and incrementally. The state implementation also allows
us to mark completely scanned files as clean so that would not
need to be re-scanned if they are not modified.
In Section 3 we describe Oyster in detail and Section
4 we detail the design of Avfs.
3 Kernel-Based Virus Scanner
In Section 3.1 we describe the internals of
ClamAV. In Section 3.2 we describe the
enhancements we made to the ClamAV virus scanner.
3.1 ClamAV Overview
We decided to use the freely available Clam AntiVirus
(ClamAV) [11] scanner as the foundation for our kernel-based virus
scanner. ClamAV consists of a core scanner library as well as various
command line programs. We modified the core ClamAV scanner library to
run inside the kernel, and call this scanner Oyster.
ClamAV Virus Database
As of December 2003, ClamAV's database had 19,807 viruses. Although this
number is smaller than those of major commercial virus scanners, which
detect anywhere from 65,000 to 120,000 viruses, the number of viruses
recognized by ClamAV has been steadily growing. In the last six months of
2003, over 12,000 new virus signatures were added to the database.
The ClamAV virus definition database contains two types of virus
patterns: (1) basic patterns that are a simple sequence of characters
that identify a virus, and (2) multi-part patterns that consist of
more than one basic sub-pattern. To match a virus, all
sub-patterns of a multi-part pattern must match in order.
ClamAV virus patterns can also contain wildcard characters. The
combination of multi-part patterns and wildcard characters allows
ClamAV to detect polymorphic viruses. Polymorphic viruses are more
difficult to detect than non-polymorphic viruses, because each
instance of a virus has a different footprint from other instances.
Basic patterns tend to be longer than multi-part patterns. Multi-part
patterns have multiple pattern to identify a complete virus.
The pattern lengths in the database vary from two bytes (for
sub-parts of a multi-part pattern) to over 2KB long.
ClamAV Virus Detection Algorithm
ClamAV uses a variation of the Aho-Corasick pattern-matching algorithm
[1], which is well suited for applications that match a large
number of patterns against input text. The algorithm operates in two steps:
(1) a pattern matching finite state machine is constructed, and (2) the text
string is used as the input to the automaton.
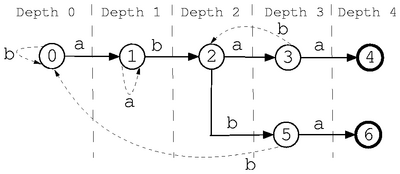 Figure 2: An automaton for keywords "abaa" and "abba" over the alphabet
{a,b}. Success transitions are shown with solid lines. Final states are
shown with bold circles. Failure transition are shown with dotted lines.
To construct a pattern matching automaton, the Aho-Corasick algorithm first
builds a finite state machine for all of the patterns. Figure 2
shows the automaton for the keywords "abaa" and "abba" over the alphabet
{a,b}. State 0 denotes the starting state of the automaton, and the
final states are shown with bold circles. First, the pattern "abaa" is
added, creating states 0-4. Thereafter, the pattern "abba" is added, creating
states 5-6. Only two additional states were required since both patterns
share the same prefix "ab." Transitions over the characters of
the patterns are called success transitions.
Each state in the pattern-matching automaton must have transitions for all
letters in the alphabet. If a success transition over a letter does not
exist for some state, then a failure transition is created. To set
up a failure transition, all states are processed in depth order; i.e.,
we process states of depth n before states of depth n+1. A state's depth
s is defined as the length of the shortest path from the start
state 0 to s. Any failure transition for start state 0 points back to
state 0. Suppose that after matching some prefix P=[1..k] of length
k the automaton is in state s. Also, suppose that there is no success
transition for some character c starting from state s. A failure
transition for the character c is determined by following transitions for
prefix P[2..k]c starting from state 0.
Failure transitions are set up as follows. First, a missing transition for
"b" from state 0 is set up to point back to state 0. State 1 does not
have a transition for "a," (there is no pattern that begins with "aa").
To determine this failure transition, the first character is removed from
the prefix, and transitions for the remaining characters are followed
starting from state 0. So, the failure transition for "a" in state 1
points back to state 1. Similarly, state 3 does not have a transition for
"b" (there is no pattern that begins with "abab"). To compute the
failure transition for "b" in state 3, transitions for "bab" are
followed from state 0. This failure transition points to state 2. Other
failure transitions are set up similarly.
To determine if a text string contains any of the patterns, it is applied as
the input to the automaton. The automaton follows transitions for each
character from the input string until either the end of the string is reached,
or the automaton visits one of the final states. To determine which pattern
matches when the automaton visits the final state s, we simply follow the shortest
path from the start state 0 to s.
This automaton is a trie data structure. Trie data structures are
used for fast pattern matching in input text. In the trie,
each node and all of its children have the same prefix. This
prefix can be retrieved by traversing the trie from the root node.
To quickly look up each character read from the input, ClamAV
constructs a trie structure with a 256-element lookup array for each
of the ASCII characters.
The memory usage of ClamAV depends on how deep the trie is. The deeper
the trie, the more nodes are created. Each node
is 1,049 bytes (1KB for the lookup array plus auxiliary data).
Since the Aho-Corasick
algorithm builds an automaton that goes as deep as the pattern length,
the memory usage of ClamAV's structure would be unacceptably large
because some patterns in the database are as long as 2KB.
Figure 2: An automaton for keywords "abaa" and "abba" over the alphabet
{a,b}. Success transitions are shown with solid lines. Final states are
shown with bold circles. Failure transition are shown with dotted lines.
To construct a pattern matching automaton, the Aho-Corasick algorithm first
builds a finite state machine for all of the patterns. Figure 2
shows the automaton for the keywords "abaa" and "abba" over the alphabet
{a,b}. State 0 denotes the starting state of the automaton, and the
final states are shown with bold circles. First, the pattern "abaa" is
added, creating states 0-4. Thereafter, the pattern "abba" is added, creating
states 5-6. Only two additional states were required since both patterns
share the same prefix "ab." Transitions over the characters of
the patterns are called success transitions.
Each state in the pattern-matching automaton must have transitions for all
letters in the alphabet. If a success transition over a letter does not
exist for some state, then a failure transition is created. To set
up a failure transition, all states are processed in depth order; i.e.,
we process states of depth n before states of depth n+1. A state's depth
s is defined as the length of the shortest path from the start
state 0 to s. Any failure transition for start state 0 points back to
state 0. Suppose that after matching some prefix P=[1..k] of length
k the automaton is in state s. Also, suppose that there is no success
transition for some character c starting from state s. A failure
transition for the character c is determined by following transitions for
prefix P[2..k]c starting from state 0.
Failure transitions are set up as follows. First, a missing transition for
"b" from state 0 is set up to point back to state 0. State 1 does not
have a transition for "a," (there is no pattern that begins with "aa").
To determine this failure transition, the first character is removed from
the prefix, and transitions for the remaining characters are followed
starting from state 0. So, the failure transition for "a" in state 1
points back to state 1. Similarly, state 3 does not have a transition for
"b" (there is no pattern that begins with "abab"). To compute the
failure transition for "b" in state 3, transitions for "bab" are
followed from state 0. This failure transition points to state 2. Other
failure transitions are set up similarly.
To determine if a text string contains any of the patterns, it is applied as
the input to the automaton. The automaton follows transitions for each
character from the input string until either the end of the string is reached,
or the automaton visits one of the final states. To determine which pattern
matches when the automaton visits the final state s, we simply follow the shortest
path from the start state 0 to s.
This automaton is a trie data structure. Trie data structures are
used for fast pattern matching in input text. In the trie,
each node and all of its children have the same prefix. This
prefix can be retrieved by traversing the trie from the root node.
To quickly look up each character read from the input, ClamAV
constructs a trie structure with a 256-element lookup array for each
of the ASCII characters.
The memory usage of ClamAV depends on how deep the trie is. The deeper
the trie, the more nodes are created. Each node
is 1,049 bytes (1KB for the lookup array plus auxiliary data).
Since the Aho-Corasick
algorithm builds an automaton that goes as deep as the pattern length,
the memory usage of ClamAV's structure would be unacceptably large
because some patterns in the database are as long as 2KB.
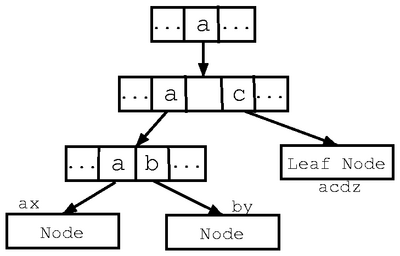
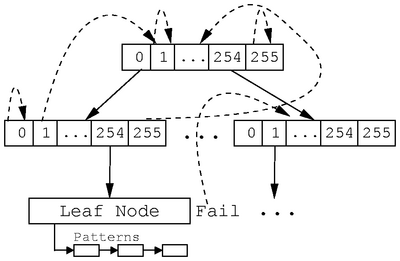 Figure 3: A fragment of the ClamAV trie structure. Success transitions
are solid lines. Failure transitions are dashed lines.
ClamAV modifies the Aho-Corasick algorithm so that the trie is constructed
only to some maximum height, and all patterns beginning with the same prefix
are stored in a linked list under the appropriate trie leaf node. ClamAV has
the further restriction that all pattern lists must be stored at the same trie
level. This restriction significantly simplifies trie construction and
pattern matching, but due to this restriction, the shortest pattern length
dictates the maximum trie height. Since the shortest pattern is only two
bytes long, ClamAV can only build a trie with two levels. Figure
3 shows a fragment of a trie built by the ClamAV
algorithm.
ClamAV takes the following steps to construct a trie:
Figure 3: A fragment of the ClamAV trie structure. Success transitions
are solid lines. Failure transitions are dashed lines.
ClamAV modifies the Aho-Corasick algorithm so that the trie is constructed
only to some maximum height, and all patterns beginning with the same prefix
are stored in a linked list under the appropriate trie leaf node. ClamAV has
the further restriction that all pattern lists must be stored at the same trie
level. This restriction significantly simplifies trie construction and
pattern matching, but due to this restriction, the shortest pattern length
dictates the maximum trie height. Since the shortest pattern is only two
bytes long, ClamAV can only build a trie with two levels. Figure
3 shows a fragment of a trie built by the ClamAV
algorithm.
ClamAV takes the following steps to construct a trie:
- Read the next pattern from the virus database.
- Traverse the trie to find an appropriate node to add the pattern to, creating new
levels as needed until the maximum trie height is reached (this step sets up
success transitions).
- Add the pattern to the linked list inside a leaf node.
- Process all nodes of the trie by depth (level-order traversal),
and set up all failure transitions.
After the trie is constructed, ClamAV is ready to check whether an
input matches any of the patterns in the trie. For each character
read, ClamAV follows the trie transition and if a leaf node is
encountered, all patterns inside the linked list are checked using
sequential string comparisons. This process continues until the last
input character is read, or a match is found.
3.2 Oyster Design
Our kernel-based virus scanner module is called by the file system to
perform scanning every time files are read for the first time,
created, or modified. Since each file contains one or more pages, and
there are many files being accessed simultaneously, two of the major
requirements for Oyster were speed and efficiency. In addition, since
the number of viruses constantly grows, the virus scanner must be
scalable. Unfortunately, ClamAV did not prove to be scalable. Its
performance gets linearly worse as the number of patterns increase
(see Section 6 for a detailed performance comparison).
In Section 3.2.1 we explain the scalability
problems with ClamAV. In Sections 3.2.2
through 3.2.4 we describe changes we made to the ClamAV
data structures and algorithms. In Section
3.2.5 we describe the Oyster API for other
kernel modules.
3.2.1 Virus Database and Scalability
The primary issue that limits ClamAV's scalability is the restriction
that all pattern lists must be stored at the same trie level. This
restriction forces the maximum trie height to be two. With the
maximum level of two, and with each node holding 256 transitions, it
would appear that this data structure should be scalable for up to
2562=65536 patterns, but this approximation is correct only if
virus signatures consist of uniformly distributed random characters.
However, virus signatures are neither random nor uniformly distributed.
Figure 4 shows the distribution of one-character
prefixes in the ClamAV's database. Just 25 out of 256 one-character
prefixes account for almost 50% of all prefixes. The distribution of two
character prefixes is not random either. There are 6,973 unique two-character
prefixes. 10% of those prefixes account for 57% of all patterns.
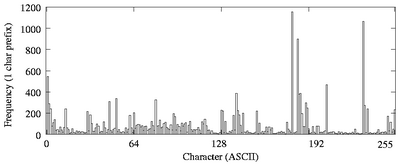 Figure 4: A histogram showing the one-character prefix distribution of ClamAV's database
with 19,807 viruses (256 unique prefixes).
This high clustering of patterns means that there are some leaf nodes
in the trie that contain linked lists with a large number of patterns.
Since all of these patterns are scanned sequentially, performance
suffers whenever such a node is traversed during file scanning. To
have acceptable performance levels with large databases, the
ClamAV data structures and algorithms had to be modified to minimize
the number of times that patterns in leaf nodes were scanned and to minimize
the number of patterns stored in each list.
Our modifications to the ClamAV data structures and algorithms are
designed to meet the following three goals: (1) improve scalability and
performance, (2) minimize memory usage and support a maximum trie height
restriction so that an upper bound on memory usage can be set, and (3)
allow the administrator to configure the system to trade-off memory vs. speed.
Figure 4: A histogram showing the one-character prefix distribution of ClamAV's database
with 19,807 viruses (256 unique prefixes).
This high clustering of patterns means that there are some leaf nodes
in the trie that contain linked lists with a large number of patterns.
Since all of these patterns are scanned sequentially, performance
suffers whenever such a node is traversed during file scanning. To
have acceptable performance levels with large databases, the
ClamAV data structures and algorithms had to be modified to minimize
the number of times that patterns in leaf nodes were scanned and to minimize
the number of patterns stored in each list.
Our modifications to the ClamAV data structures and algorithms are
designed to meet the following three goals: (1) improve scalability and
performance, (2) minimize memory usage and support a maximum trie height
restriction so that an upper bound on memory usage can be set, and (3)
allow the administrator to configure the system to trade-off memory vs. speed.
3.2.2 Variable Height Trie
To improve performance and scalability for large databases, we
redesigned the ClamAV data structures to support trie heights greater
than two. With each additional level, we add an additional 256-way
fan-out for the trie, thus reducing the probability that leaf nodes
will be scanned, which in turn improves performance. Patterns that
are shorter than the maximum trie height or contain a wildcard
character at a position less than the maximum trie height must be
added to the linked lists in the intermediate trie nodes. Such nodes
can contain both transitions to the lower level as well as
patterns. We will use "?" to denote a single wildcard
character. Figure 5 shows a trie with a height
of four (plus leaf nodes). The trie contains patterns beginning with
ASCII characters < 254, 0, 0, 79 > (node 8). It also
contains patterns that begin with < 0, 0, ? > (node 3),
as well as patterns beginning with < 0, 0, 123, 255 >
(node 7).
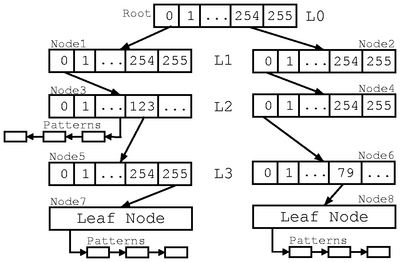 Figure 5: A trie with four levels (only success transitions are shown). Patterns
beginning with characters < 0, 0, ? > are
stored inside node 3, which contains both patterns and
transitions.
The trie depicted in Figure 5 has two
problems. The first problem is memory usage. If a pattern can be
uniquely identified by a two-character prefix, then there is no need to
store it at the maximum trie height level since a lot of memory would be
used due to the large node size (each node is over 1KB). Our solution stores
the pattern at the lowest possible level as soon as a unique prefix for
this pattern is found.
[Step 1]
Figure 5: A trie with four levels (only success transitions are shown). Patterns
beginning with characters < 0, 0, ? > are
stored inside node 3, which contains both patterns and
transitions.
The trie depicted in Figure 5 has two
problems. The first problem is memory usage. If a pattern can be
uniquely identified by a two-character prefix, then there is no need to
store it at the maximum trie height level since a lot of memory would be
used due to the large node size (each node is over 1KB). Our solution stores
the pattern at the lowest possible level as soon as a unique prefix for
this pattern is found.
[Step 1]
 [Step 2]
[Step 2]
 [Step 3]
[Step 3]
 [Step 4]
[Step 4]
 [Step 5]
[Step 5]
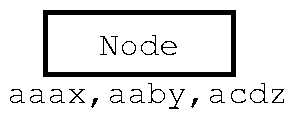
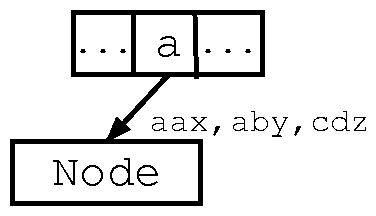
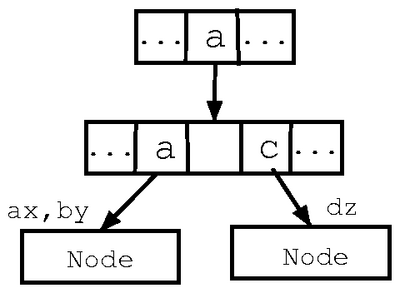
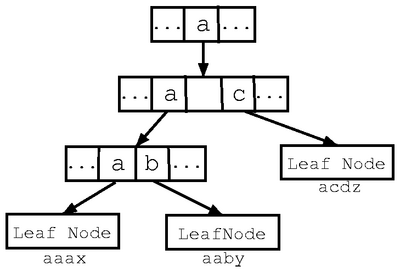 Figure 6: Operation of the addpatterns function.
The second problem is more involved. Suppose we have two patterns
< 0, 0, ?, 1 > and < 254, 0, 0, 79, 10 > .
The first pattern is stored inside node 3 in Figure
5. This pattern cannot be stored at a higher
level because a transition over the wildcard is not unique. The
second pattern is stored inside node 8. Now suppose that we have an
input string < 254, 0, 0, 79, 1 > . The automaton will
start transitioning through the right hand side of the trie: root node, node
2, node 4, node 6, and finally node 8. At this point, the last input
character "1" will be matched against the last character of the
pattern < 254, 0, 0, 79, 10 > , and the match will fail.
However, while traversing the right hand side of the trie, the
characters < 0, 0, 79, 1 > match the pattern stored
inside node 3, but we never visited this node to detect the match.
More formally, if we have two patterns with unique prefixes
P1[1..m] and P2[1..n], m > n, and
P1[j..k]=P2[1..n], where j > =2 and k < =m, then the
patterns with prefix P2 must be scanned as soon as character k
is read. We call this situation a collision.
Figure 6: Operation of the addpatterns function.
The second problem is more involved. Suppose we have two patterns
< 0, 0, ?, 1 > and < 254, 0, 0, 79, 10 > .
The first pattern is stored inside node 3 in Figure
5. This pattern cannot be stored at a higher
level because a transition over the wildcard is not unique. The
second pattern is stored inside node 8. Now suppose that we have an
input string < 254, 0, 0, 79, 1 > . The automaton will
start transitioning through the right hand side of the trie: root node, node
2, node 4, node 6, and finally node 8. At this point, the last input
character "1" will be matched against the last character of the
pattern < 254, 0, 0, 79, 10 > , and the match will fail.
However, while traversing the right hand side of the trie, the
characters < 0, 0, 79, 1 > match the pattern stored
inside node 3, but we never visited this node to detect the match.
More formally, if we have two patterns with unique prefixes
P1[1..m] and P2[1..n], m > n, and
P1[j..k]=P2[1..n], where j > =2 and k < =m, then the
patterns with prefix P2 must be scanned as soon as character k
is read. We call this situation a collision.
3.2.3 Improving Memory Usage
To store patterns at the lowest possible level, we modified the ClamAV
trie construction algorithm. Instead of storing the patterns in the
trie as soon as they are read from the database, we store them in an
array. We sort this array lexicographically by comparing pattern
prefixes of length equal to the maximum trie height. After the
patterns are sorted, each pattern is assigned an ID that is equal to the
pattern's offset in the sorted pattern array. This sorting
enables Oyster to conveniently identify all patterns with some unique
prefix P by specifying start and end offsets into the sorted array.
We then proceed with the trie construction by calling our
addpatterns(node, start_offset,
end_offset) function, where node is the current
node in the trie, start_offset and end_offset are
offsets into the sorted pattern array that identify the range of
patterns to add to the node. To begin trie construction, we call
addpatterns, passing it the root node and the entire range
of patterns as arguments. The addpatterns function operates
as follows:
- If the maximum trie height is reached, add all patterns in the range
to the current node and return.
- If the range contains only one pattern, add this pattern to the current
node, and return.
- Add to the current node all patterns of length equal to the
current height and all patterns that have a "?" character at the current
height. If there are no more patterns left, return.
- Otherwise, the range still contains patterns. For each character 0 < =i < =255, find the range of patterns that have character i in
the position equal to the current height, create transitions for
i inside the current node, and recursively call the function with the new
range and new node. The maximum recursion depth is equal to the maximum
trie height. The kernel has a limited stack size, but because our recursive
function is bounded by a small maximum trie height, there is no danger of
stack overflow.
The Figure 6 shows the trie construction process for the
patterns {aaax, aaby, acdz}. In step 1, addpatterns is
called with a node and the three patterns in the range. Since there
is more than one pattern in the range, addpatterns creates a
transition for the character a, and recursively calls itself with the
same range, but using the node at the next level down. In step 2, the
next characters from the patterns are compared. Two transitions for
characters a and c are set up and the function calls itself
recursively twice, once with the range containing the patterns {aaax,
aaby}, and once with {acdz} (step 3). In step 4, the pattern
"acdz" is added to the current node since the range contains only
one pattern, and the remaining patterns get added to the next level in
step 5. Notice that the pattern "acdz" was added as soon as the
unique prefix "ac" was found for this pattern (step 4).
Since the pattern array was presorted, whenever patterns
(delimited by start_offset and end_offset) get
added to a node, they begin with the same prefix, and therefore have
sequential pattern IDs. This reduces memory usage. Instead of
creating a linked list of patterns, we simply add a pattern-range
structure to the node. The pattern-range structure has three members:
(1) start offset, (2) end offset, and (3) the level of the trie where
the range is stored. The level member of this structure determines how
many characters from all of the patterns are already matched by the
trie prefix.
The trie construction algorithm described above minimizes memory usage
by storing each pattern at the lowest possible level. The algorithm
maintains the maximum trie height restriction to enforce an upper
bound on memory usage. In addition, we provide a recommended minimum
height configuration parameter to allow a trade-off between
speed and memory usage. Even if a pattern can be uniquely identified
by a single character prefix, it is not added to the trie until the
recommended minimum height is reached. Short patterns or patterns
with wildcard characters are still stored at levels below the
recommended minimum trie height. Increasing the recommended minimum
height parameter increases memory usage. This increase, however,
could improve performance because leaf nodes of the trie would be
scanned less frequently due to the larger trie height (see Section
6). Note that the minimum trie height parameter should
not be set too high. In our tests, a minimum height of three proved
to be scalable with databases of up to 128K virus definitions. A
combination of minimum and maximum heights allows for
flexibility in tuning performance and memory usage.
3.2.4 Collision Detection and Avoidance
Collisions are detected using a simple procedure. We start processing
every node in the trie in a level-order traversal; i.e., process all
nodes on level n before processing nodes on level n+1. For every
success transition in a node A, we traverse the trie as if it were a
failure transition. We look at a node, say node B, pointed to by
the failure transition. If node B has pattern ranges stored under
it, then there is a collision. Whenever a collision is detected, all
pattern ranges from node B are copied to node A. The level member
of the pattern range structure, which identifies the number of
characters matched so far, is not modified during the copy operation.
Preferably, we wish to avoid collisions whenever possible. If too many collisions
occur, then instead of having a lot of patterns stored in the linked lists,
we will have many pattern ranges stored. To avoid collisions, we exploit
two facts: (1) the trie constructed by the addpatterns function
attempts to add patterns as soon as possible before the maximum trie height
is reached, and (2) if the maximum trie height is greater than one, failure
transitions from a leaf node can never point to another leaf node.
Instead of copying pattern ranges as soon as a collision is detected, we
first attempt to push from both nodes A and B down the
trie. This reduces the probability of a collision by 2562
times if ranges from both A and B can be pushed down, or by 256 times
if only one of the ranges can be pushed down. The only time pushing down is
not possible is if ranges for either A or B contain short patterns or
have patterns with a wildcard character in the position equal to the level
of the node. If a pattern is already stored on the leaf node, we are
guaranteed that this node's pattern ranges will not collide with any other
node.
Figure 7 shows a final trie constructed by
our algorithm. Patterns beginning with characters < 0,254 > are stored at level two (node A) because either they are short or
they have a wildcard character in position two. These
patterns are copied by node B due to a collision. The rest of
the patterns are stored under leaf nodes.
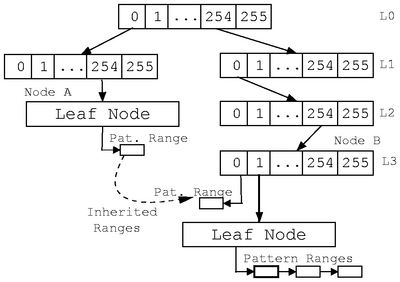 Figure 7: Final trie structure for Oyster. Only success transitions are shown.
Figure 7: Final trie structure for Oyster. Only success transitions are shown.
To summarize, Oyster takes the following steps to construct a trie:
- Read all patterns from the virus database and store them in a sorted array.
- Call the addpatterns function to build a trie and
initialize success transitions.
- Execute the pattern-collision detection and avoidance procedure.
- Set up the failure transitions.
3.2.5 Oyster File System Integration
Oyster provides a simple interface to the file system to perform scanning.
It exports a scanbuf function which is responsible for scanning a
buffer for viruses. The scanbuf function supports two modes of
scanning: full mode, which scans for all patterns, and regular mode,
which scans all regular (non multi-part) patterns. The scanbuf function takes the
following five parameters: (1) a buffer to scan, (2) the buffer length, (3) the
buffer's position in the file, (4) an Oyster state structure, and (5) various
flags that determine the scan mode, state handling, and other aspects of
the operation. The return code of this function indicates whether the buffer is
clean or infected.
The state structure enables Oyster to continue scanning the next buffer
right from where the previous call to scanbuf left off. The state
structure contains the following four members: (1) a linked list of
partially-matched patterns represented by the pattern ID and the position of the
last character successfully matched, (2) a node ID identifying the trie node where
the previous call left off, (3) a structure to keep track of multi-part
pattern matches, and (4) a virus database checksum, which we use to check the
validity of the state against the currently-loaded database.
We keep only one state structure for each opened inode (file on disk).
Multiple processes that read or write to the same file share a single
state structure. The size of the state depends on the number of
partially-matched viruses, and is usually around 512 bytes. We do not
export the state structure to external modules. Instead, we provide
functions to allocate and deallocate the structure, as well as
functions to serialize and deserialize it so that external modules can
store the state persistently.
To load the Oyster module into the kernel, we specify the database
files to load as well as the minimum and the maximum trie heights
parameters. After the Oyster module is loaded, external file system
modules can use Oyster to perform on-access scanning.
3.2.6 Summary of Improvements
Our Oyster scanner improves on ClamAV in two ways: performance and
scalability, and kernel integration.
We allow trie heights larger than two, which improves performance
logarithmically. Oyster can limit the maximum tree height, to minimize memory
usage and improve scalability. We additionally improve performance by
allowing pattern scanning to terminate at intermediate trie nodes instead of
having to go all the way down to leaf nodes.
ClamAV was designed for scanning whole files in the
user level, making assumptions that are unsuitable for running inside
kernels. For example, ClamAV scans entire files sequentially, 132KB at a
time. Oyster, on the other hand, uses data units that are native to the
kernel, scanning one page at a time (4KB on IA-32 hosts). Finally, whereas
ClamAV scans whole files sequentially, Oyster scans individual pages as they
are being accessed-regardless of the order in which they are
accessed. This improves performance and guarantees that no infected data is
ever leaked. We introduced a state structure to incrementally record the
partial scan status of individual pages, and also found that this structure
improves performance by up to 68% as compared to ClamAV.
4 The Anti-virus File System
We designed Avfs to achieve the following three goals:
- Accuracy and high-security:
- We achieve this by detecting
viruses early and preventing viruses from corrupting the file system.
- Performance:
-
We perform partial scanning and avoid repetitive scanning.
- Flexibility and portability:
- Being a stackable file system,
Avfs is portable. Moreover, user-oriented features such as forensics and
versioning provide flexible options for deployment.
Avfs is a stackable file system for Linux that interfaces with Oyster,
as described in Section 3, to provide virus protection.
The advantages of being a stackable file system include transparent
operation and portability to a variety of other file systems. A
state-oriented approach allows Avfs to perform partial and
non-repetitive scanning.
4.1 State-Oriented Design
There are two types of state involved in providing on-access virus
protection in our system. The first allows safe access to files
through the read and write methods by tracking
patterns across page boundaries. This state is computed by Oyster
and is maintained by Avfs. The second type of state is used to avoid
repetitive scanning and is stored persistently as part of a file by
Avfs.
The Oyster scanning module can partially scan files. Oyster can scan one
part, say b1 of a buffer B = b1+b2 and compute a state s1
at the end of this scan. State s1 and the second part of the buffer,
b2, can be passed to Oyster and the effect of these two scans would be
as if buffer B was scanned all at once. Avfs maintains this Oyster state
for each file in the file system. When the file is being accessed, this
state is kept in memory as part of the in-memory inode structure of the
file. We record this state after each page scan, thereby overwriting the
previous state.
We do not maintain state for individual pages because the
current stackable file system infrastructure has no provision for it. Also,
it might be expensive in terms of space utilization. We could store all the
state for multiple pages in a single structure, but with increasing file
sizes, maintaining this structure becomes expensive.
Our state design divides a file logically into two parts: one scanned
and the other unscanned. Along with this state, Avfs also records the
page index to which this state corresponds, so that Avfs can provide
subsequent pages for scanning in the correct order. When a file is
closed, we store this state persistently so that we can resume
scanning from where we left off. We use an auxiliary state
file for each file in a separate hidden directory under the Avfs
mount called the state directory. Avfs traps the
lookup and readdir operations to prevent access to
this directory and its contents by users. The state file's name
is a derivative of the inode number of the corresponding file. This
facilitates easy access of the state file because the inode number of
a file can be easily obtained and thus the state file name can be
easily generated. When a file is closed, the entire state (Oyster state +
page index) is written into its state file.
In addition to the Oyster state, Avfs has some state of its own which
allows it to mark files clean, quarantined, or
unknown. These file states are stored as flags in the main
file's on-disk inode structure. To quarantine a file we change its
permissions to 000, so that non-root users could not access it. Also, if
the underlying file system is Ext2/3, we set the immutable
flag so that even root could not modify the file without changing its
attributes.
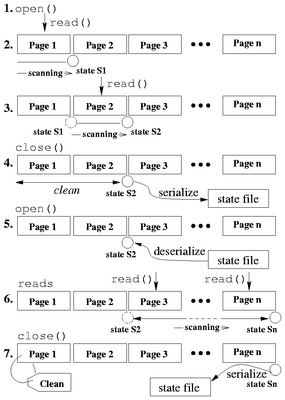 Figure 8: Typical operations on files and their processing in Avfs.
Figure 8 illustrates a few operations and
their effects on a file under Avfs in a few simple steps:
Figure 8: Typical operations on files and their processing in Avfs.
Figure 8 illustrates a few operations and
their effects on a file under Avfs in a few simple steps:
- During the first open on an unknown file, there is no state
associated and the operation proceeds normally.
-
On a read of page 1 of the file, the data is scanned and a
state S1 is computed by Oyster at the end of this scan. This state
corresponds to the first page.
-
Reading to the next page of the file makes use of the previous state
S1 for scanning.
-
When a file is closed, the state needs to be stored persistently. A
serialized form of the state is stored into an auxiliary state file.
-
Another open on the file causes the state to be deserialized
from the state file and brought back into memory for further scanning.
-
Further sequential reads of the file make use of the previous state
and ultimately the file gets scanned completely.
-
If the file has been scanned completely, then during its
close, the latest state is written to the state file and the
file is marked clean. A clean file is not scanned during
subsequent accesses unless it is modified.
This state-oriented design provides a basis for a variety of features,
described next.
4.2 Modes of Operation
We designed two scanning modes: a full mode that scans for
all patterns in Oyster's virus database and a regular mode
that scans for regular patterns only. We also designed two
user-oriented forensic modes for different classes of users and sites
of deployment. These two forensic modes are called Immediate
and Deferred. Avfs can be mounted with any combination of
scanning and forensic modes using mount-time options. We describe the
two scan modes in Section 4.2.1 and the forensic modes
in Section 4.2.2
4.2.1 Scan Modes
Regular and multi-part (polymorphic) patterns are explained in detail
in Section 3.1. In full mode, Oyster scans input for
all the patterns (regular and multi-part) in the database, making use
of its full trie structure. Scanning multi-part patterns
can be expensive in terms of speed because they can span
several pages of a file. Writes to random locations in a file
can cause repetitive scanning of the whole file. In regular mode,
Oyster scans input only for regular patterns. The full mode is accurate in
the sense that it scans the input for all patterns (including
multi-part patterns using their virus definitions) in the database.
The regular mode trades-off accuracy for speed by scanning only
for regular patterns.
The semantics of the full mode are different for unknown and clean
files. For unknown files during sequential reads, we always have
state at the end of the previous page and as we progress toward the
end of the file it gets gradually scanned and finally is marked clean.
If we have random reads from different parts of the file, we adopt a
different strategy. Random reads ahead of the current scanned page
trigger a scan of the intermediate pages. For random reads before the
current scanned page, we simply ignore scanning because that part of
the file has already been scanned.
Sequential writes are dealt with in the same way as sequential reads,
but the case of random writes is slightly different. Multi-part
patterns of the form P={p1, p2, p3, ... , pn} are hard to detect
because we could have the following scenario. Consider a multi-part
pattern P={p1,p2,p3} and an empty file. The first write could
produce p2 on page 2. Our scanner would scan the file until the end
of page 2 and find that the file is clean. The next write could be
p3 on page 3. The final write of p1 to page 1 would complete the
whole virus in the file. To avoid this, the state maintained after
the write to page 3 should be invalidated during the write to page 1
and the whole file should be scanned to detect the virus.
We implemented this technique which scans the whole file for
multi-part patterns using the multi-part trie structure of Oyster on
every random write, but it proved to be inefficient because
some programs like ld write randomly around the two ends of
the file and hence cause a number of rescans over the entire length of
the file. Our current implementation, therefore, has a
full-scan-on-close flag on the file's inode which, when set,
causes the file to be scanned completely for multi-part viruses when
the file is closed. This flag is set if there are random writes
before the current scanned page, and the page is scanned only for
regular patterns using a cushioned scan implementation. A
cushioned scan works by extending the concerned page with sufficiently
large buffers of data on either side to guarantee that patterns are detected
across page boundaries. The size of a cushion buffer is equal to the
length of the longest pattern available in Oyster's database
(currently 2,467 characters). A cushioned scan is shown in Figure
9.
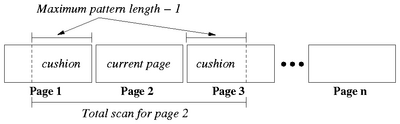 Figure 9: A cushioned scan implementation for viruses spread across page boundaries
We have a configurable parameter max-jump that decides when
the full-scan-on-close flag should be set. Forward random writes to
pages within max-jump from the current scanned page cause intermediate
pages to be scanned for all viruses, but forward writes to pages
greater than max-jump cause only the regular patterns to be scanned
for, and the full-scan-on-close flag is set. If this flag is set,
access to the file is denied for all other processes except the
current process performing the random writes. When the file is closed,
the state is stored persistently in the file's state file. If
the state indicates that the last page was scanned, the file is safely
marked clean; otherwise, the state represents the last scanned page of
the file.
After a file is marked clean, new reads do not result in additional scans.
Appends to a clean file are dealt with in
the same way as sequential writes for unknown files (files that are
not marked clean). Writes to the middle of the file are handled in a
similar fashion as writes to unknown files.
The regular mode is almost identical to the full mode except
that it scans the input only for regular patterns. Reads to unknown
or clean files, as well as sequential writes, are treated in the same way as
in full mode. Random writes past the current scanned page force
scanning of intermediate pages, and backward writes use cushioned
scanning. The value of the maximum pattern length is currently less than
a page size, so cushioned scanning adds a maximum overhead of
scanning one page on either side. This overhead is less than in full
mode because in full mode we have to scan the entire file to detect multi-part
viruses. For large files, full mode is slower than the
regular mode. Regular mode is useful in cases where random read and
write performance is important. Full mode should be used when detection of multi-part
patterns is required.
Figure 9: A cushioned scan implementation for viruses spread across page boundaries
We have a configurable parameter max-jump that decides when
the full-scan-on-close flag should be set. Forward random writes to
pages within max-jump from the current scanned page cause intermediate
pages to be scanned for all viruses, but forward writes to pages
greater than max-jump cause only the regular patterns to be scanned
for, and the full-scan-on-close flag is set. If this flag is set,
access to the file is denied for all other processes except the
current process performing the random writes. When the file is closed,
the state is stored persistently in the file's state file. If
the state indicates that the last page was scanned, the file is safely
marked clean; otherwise, the state represents the last scanned page of
the file.
After a file is marked clean, new reads do not result in additional scans.
Appends to a clean file are dealt with in
the same way as sequential writes for unknown files (files that are
not marked clean). Writes to the middle of the file are handled in a
similar fashion as writes to unknown files.
The regular mode is almost identical to the full mode except
that it scans the input only for regular patterns. Reads to unknown
or clean files, as well as sequential writes, are treated in the same way as
in full mode. Random writes past the current scanned page force
scanning of intermediate pages, and backward writes use cushioned
scanning. The value of the maximum pattern length is currently less than
a page size, so cushioned scanning adds a maximum overhead of
scanning one page on either side. This overhead is less than in full
mode because in full mode we have to scan the entire file to detect multi-part
viruses. For large files, full mode is slower than the
regular mode. Regular mode is useful in cases where random read and
write performance is important. Full mode should be used when detection of multi-part
patterns is required.
4.2.2 Forensic Modes
If a process writes a virus into the file system, the process should
be notified of this behavior as early as possible. Also, if a process
is reading from an infected file, then the read must not succeed.
These requirements motivated the development of an immediate
mode that would not let viruses to be written to disk and return an
error to the process so that it can take remedial action. Immediate
mode is especially suited to a single-user environment where
protection from viruses is the prime requirement.
In addition to the immediate mode, we developed another mode called
the deferred mode which defers the error notification and
records malicious activity. Such a mode is suitable for large
enterprise servers where several users access data concurrently. In
addition to on-access virus protection, this mode provides
(1) data consistency by backing up files, and (2) a mechanism to trace
processes that attempt to write viruses into the file system. We keep
evidence such as process information, time of attack, and infected
files, so that the incident can be investigated later.
When Avfs is mounted over an existing file system, it is possible for
the underlying file system to already contain some virus-infected
files. Such existing virus-infected files are detected during reads
from the file. In this case, the file is quarantined, so that no
process could access it. Another possibility of a virus infection is
through a process that tries to write a virus into the file system.
In the immediate mode, these writes are trapped in the Avfs layer
itself and are not allowed to propagate to the lower file system.
Permission for such a write is denied and the offending process is
immediately notified of the corresponding error. The file remains
consistent up to the last successful write to the file. The file,
however, may have multi-part viruses or viruses that span over
page-boundaries. A multi-part virus is not detected until all of its
parts are discovered in the correct sequence in a file. At the same
time, a file cannot be called clean if it contains even one part of a
multi-part virus. Hence, if most parts of a multi-part virus are
written and the virus is detected on writing the last part, the file
could still be corrupted due to the previous virus parts. If a
regular virus spans across page boundaries, only the last write
to the page that completes the virus is denied.
Deferred mode operates in the same way as immediate mode for existing
virus-infected files. These files are simply quarantined and access
to them is denied. Attempts to write viruses, however, are treated
differently. Files can have multiple instances open simultaneously.
An open on a file causes an instance to be created and a
close on that instance causes the instance to terminate. We
define a session to be the duration between the first open
of the file and the last close of the file. We back up a file during
the first write of a session.
We keep this backup in case a virus is created in the course of this
session. In such a situation, we revert to the backup and restore
the file to a consistent state. Here, we have only one version of
the file which prevents us from reverting to versions more than one
session old. If some parts of a multi-part virus are written over
several sessions, we cannot revert to totally clean versions (without
any part of the virus) because we cannot detect such a virus until
all its parts are written. With multiple file versions, however,
this problem is easily solved.
When an attempt to write a virus is detected, we record the time of
the event and the process identifier (PID) of the offending process.
We do not return an error immediately to the process. Instead, we
lead it to believe that the write was successful and allow it to
proceed writing. However, we prevent read access to the file for the
offending process, so that it cannot read the virus it had written.
In addition to that, we also deny all access (read, write, open) to
the file for all other processes. On close of the session, we rename
the infected file to a new name with the recorded PID and time stamp as
an evidence of the offense. Then, we rename the saved backup to the
original name so that data-consistency is ensured. The saved evidence
file can be used to launch an investigation into the incident.
5 Related Work
There are several anti-virus systems available today. Most of these
systems are commercial products: Symantec's Norton Antivirus [18],
McAfee Virusscan [13], Sophos [17],
Anti-Virus by Kaspersky Lab [9], Computer Associates's
eTrust [4], and others. To protect trade secrets, little
information is released about their internals. Their development is
closed, and there is no opportunity for peer review. Although the
internals of these products are trade secrets, advertised information
and white papers suggest their general structure. Most of the
commercial scanners detect viruses using virus signature
databases. These scanners boast large virus databases ranging
anywhere from 65,000 to 120,000 patterns, which have been built over
long periods. They also use heuristic engines for scanning. The
heuristic engines eliminate files that cannot contain viruses, and
scan only the suspicious ones. Such heuristics typically include
identifying executable file types, appropriate file sizes, and
scanning only certain regions of files for viruses.
Some commercial scanners offer real-time virus
protection. Real-time protection involves scanning files for viruses
when they are used. This is done by intercepting the open,
close, or exec system calls and scanning entire
files when these system calls are invoked. Scanning during an open system
call detects a virus only if the file is already infected. If a virus
is not present during the open, but is written into the file after the
open operation, on-open scanning does not detect it. This is
the reason most real-time scanners scan for viruses on close
of the file as well. This scheme has three drawbacks. First, viruses
can be detected only after they have been written to the file. If the file
cannot be repaired, critical data cannot be
restored. Second, multiple processes can access a virus in a file
before the file is scanned during close. Third, scanning
files on both open and close results in scanning
them twice.
ClamAV [11] is a open-source system which forms the
basis of our scanning engine. ClamAV maintains an up-to-date
virus-definition database; it has been adopted as the primary
virus-scanner in many organizations and is the basis for several
open-source projects.
Dazuko is a kernel module that provides third-party applications an
interface for file access control [6]. Dazuko was
originally developed by H+BEDV Datentechnik GmbH, but has been
released as free software to encourage development and to enable users
to compile the module into their custom kernels. Dazuko
intercepts the open, close, and exec system
calls. It passes control to virus-scanners during these system calls
to perform on-access (on-open, on-close,
on-exec) virus scanning. Clamuko [11] (the on-access
scanner from ClamAV) and H+BEDV [7] are two virus scanners
that use Dazuko. One disadvantage of using systems like Dazuko is
that its kernel module has to communicate with user-level virus
scanners, slowing performance. Sockets or devices are used for
communication, so data also has to traverse protocol layers. Finally,
data-copies have to be performed between the kernel and the user-level.
The Internet Content Adaptation Protocol (ICAP) [8]
is a protocol designed to off-load specific
Internet-based content to dedicated servers, thereby freeing up resources
and standardizing the way features are implemented.
ICAP servers focus on providing specific functionality such as spam
filtering or virus scanning. The downside of this scheme is performance:
data is transfered over the network to the virus-scanning server.
6 Evaluation
We evaluated the performance of Avfs under a variety of system
conditions by comparing it to other commercial and open-source
anti-virus systems.
All benchmarks were performed on Red Hat Linux 9 with a vanilla 2.4.22
kernel running on a 1.7GHz Pentium 4 processor with 1GB of RAM. A
20GB 7200 RPM Western Digital Caviar IDE disk was used for all the
experiments. To ensure cold-cache results, we unmounted the file
systems on which the experiments were conducted between successive
runs. To reduce I/O effects due to ZCAV, we located the tests on a
partition toward the outside of the disk that was just large enough
for the test data [5]. We recorded the elapsed,
system, and user times for all tests. We computed the wait time,
which is the elapsed time minus the CPU and user times used. Wait time
is primarily due to I/O, but other factors such as scheduling can
affect it.
Each test was run at least 10 times. We used the Student-t
distribution to compute 95% confidence intervals for the mean
elapsed, system, and user times. In each case the half-widths of the
confidence intervals were less than 5% of the mean.
The user time is not affected by Avfs because only the kernel is
changed; therefore we do not discuss user time results.
In Section 6.1 we describe the configurations used
for Avfs. Section 6.2 describes the workloads
we used to exercise Avfs. We describe the properties of our virus
database in Section 6.3. In Section
6.4 we present the results from an Am-Utils compile.
Section 6.5 presents the results of Postmark. Finally,
in Section 6.6 we compare our scanning engine to
others.
6.1 Configurations
We used all the combinations of our scanning modes and forensic modes for
evaluating Avfs.
We used two scanning modes:
- FULL: Scan for all patterns including multi-part ones.
- REGULAR: Scan only for regular patterns.
Each scanning mode was tested with both of our forensic modes:
- IMMEDIATE: This mode returns an error to the process
immediately and does not allow malicious writes to reach the disk.
- DEFERRED: This mode backs up a file so it can
be restored to a consistent state after an infection and provide
information to trace malicious activity.
We used the default trie minimum height of three and maximum of three for
all tests, unless otherwise mentioned. A minimum height of three gave us
the best performance for all databases and a maximum height of three gave
us the best performance for databases of small sizes like 1K, 2K, 4K and 8K
patterns. We show later, in Section 6.4, how the maximum
height parameter can be tuned to improve performance for large databases.
For commercial anti-virus products that support on-access scanning, we
ran the Am-Utils compile and the Postmark benchmarks.
Clamuko and H+BEDV are in this category.
Sophos and some other commercial virus scanners do not support on-access
scanning trivially, so we compared the performance of our scanning engine
to these on large files using command line utilities.
6.2 Workloads
We ran three types of benchmarks on our system: a CPU-intensive
benchmark, an I/O intensive one, and one that compares
our scanning engine with anti-virus products that do not support
on-access scanning.
The first workload was a build of Am-Utils [14]. We
used Am-Utils 6.1b3: it contains over 60,000 lines of C code in 430
files. The build process begins by running several hundred small
configuration tests to detect system features. It then builds a
shared library, ten binaries, four scripts, and documentation: a total
of 152 new files and 19 new directories. Though the Am-Utils compile
is CPU intensive, it contains a fair mix of file system operations,
which result in the creation of several files and random read and write
operations on them. For each file, a state file is created and backups of
files are created in the deferred forensic mode. These operations of the
Am-Utils benchmark sufficiently exercise Avfs. We ran this benchmark with
all four combinations of scanning and forensic modes that we support. This
workload demonstrates the performance impact a user might see when using
Avfs under a normal workload.
For this benchmark, 25% of the operations are writes, 22% are
lseek operations, 20.5% are reads, 10% are open
operations, 10% are close operations, and the remaining
operations are a mix of readdir, lookup, etc.
The second workload we chose was Postmark [10].
Postmark simulates the operation of electronic mail servers.
It performs a series of file system operations such as
appends, file reads, directory lookups, creations, and deletions.
This benchmark uses little CPU, but is I/O intensive. We configured
Postmark to create 500 files, each between 4KB and 1MB, and
perform 5,000 transactions. We chose 1MB as the file size
as it was the average inbox size on our large campus mail server.
For this configuration, 45.7% of the operations are writes, 31.7%
are reads and the remaining are a mix of operations like
open, lookup, etc. (We used Tracefs [2]
to measure the exact distribution of operations in the Am-Utils and
Postmark benchmarks.)
The third benchmark compares various user-level command-line scanners available
today with our scanner. We scanned two clean 1GB files. The first file
had random bytes and the second file was a concatenation of files in
/usr/lib. The latter represents various executables and hence
exercises various parts of the scanning trie under more realistic
circumstances than random data. Overall, this workload exercises
both scanning for viruses and also loading the virus database.
Note that the Oyster module and its user-level counterpart have almost
identical code with the exception of memory allocation functions
(kmalloc vs. malloc) and some kernel specific data
structures.
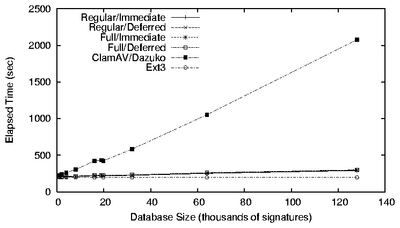
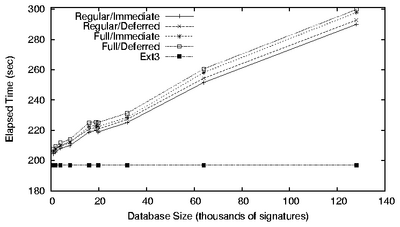 Figure 10: Am-Utils results. The figure on the left shows
results for all Avfs modes, ClamAV, and Ext3. The figure on the
right shows a detailed view for Avfs and Ext3 (note that the Y
axis starts at 180 seconds).
Figure 10: Am-Utils results. The figure on the left shows
results for all Avfs modes, ClamAV, and Ext3. The figure on the
right shows a detailed view for Avfs and Ext3 (note that the Y
axis starts at 180 seconds).
6.3 Test Virus Databases
To evaluate the performance and the scalability of our Oyster virus scanner,
we had to generate test virus databases with different numbers of
virus signatures. To generate a virus database with fewer than the
19,807 patterns contained in the current ClamAV virus database, we
simply picked signatures at random from the original database.
The generation of realistic larger databases was more involved.
The most straightforward approach was to simply generate random virus
signatures. However, as described in Section
3.2.1, this approach would not yield a
representative worst-case virus database.
Instead, we obtained the following statistics from the existing
ClamAV virus database: (1) the distribution of all unique four
character prefixes, Dp; (2) the distribution of virus signature
lengths, Dl; (3) the percentage of multi-part patterns in the
database, Pm; and (4) the distribution of the number of sub-patterns
for each multi-part pattern, Ds.
The prefixes of length four were chosen because this number was larger then
the minimum trie height parameter in our experiments.
To generate one signature, we first determined at random whether the
new signature will be a basic or a multi-part signature using
the percentage Pm.
If the new signature is a multi-part signature, we determined the
number of sub-parts based on the distribution Ds, and then generated
one basic pattern for each sub-part.
To generate a basic signature, we randomly sampled from the distribution
Dp to determine the prefix that will be used for this pattern; next, we
sampled from the distribution Dl to determine the length of the
signature. If the length is greater than four bytes, the remaining
characters are generated randomly.
The above process was repeated as many times as necessary to generate
a database of the desired size.
For our evaluation, we generated databases ranging from 210 to
217 (128K) signatures. We verified that the resulting
databases had distribution characteristics similar to the current ClamAV
database.
6.4 Am-Utils Results
Figure 10 shows the performance for the Am-Utils
compile benchmark using various database sizes. The left hand side of
this figure shows the results for four Avfs modes, ClamAV, and Ext3.
The right hand side of this figure shows a detailed view for Avfs
modes and Ext3. Table 1 summarizes the Am-Utils
benchmark results.
| Ext3
| Full Deferred
| ClamAV |
| Size
| Elapsed | System
| Elapsed | System
| Elapsed | System |
| 1K | 196.9 | 42.4 | 207.7 | 52.1 | 225.4 | 81.5 |
| 4K | 196.9 | 42.4 | 211.7 | 56.2 | 262.9 | 118.3 |
| 19.8K | 196.9 | 42.4 | 225.5 | 69.7 | 433.5 | 289.3 |
| 64K | 196.9 | 42.4 | 260.6 | 105.4 | 1052.8 | 908.8 |
| 128K | 196.9 | 42.4 | 299.9 | 144.5 | 2077.4 | 1933.0 |
|
| Overhead over Ext3 (%) |
| 1K | - | - | 5.5 | 22.8 | 14.5 | 92.2 |
| 4K | - | - | 7.5 | 32.5 | 33.5 | 179.0 |
| 19.8K | - | - | 14.5 | 64.3 | 120.2 | 582.3 |
| 64K | - | - | 32.3 | 148.4 | 434.7 | 2043.4 |
| 128K | - | - | 52.3 | 240.4 | 955.0 | 4459.0 |
Table 1: Am-Utils build times. Elapsed and System times are in seconds.
The size of 19.8K corresponds to the current ClamAV database.
The Oyster scanner was configured to use trie heights of three for
both minimum and maximum trie height parameters. A minimum height of
three gave us the best performance for all databases and a maximum
height of three gave us the best performance for databases of small
sizes like 1K, 2K, 4K, and 8K patterns. We demonstrate later in this
section how the maximum height parameter can be varied to improve
performance for large databases.
All of the modes have similar overhead over Ext3, with the slowest
mode, FULL/DEFERRED, being 0.5-2.7% slower than the fastest
mode, REGULAR/IMMEDIATE. In the FULL/DEFERRED mode,
the elapsed time overheads over Ext3 varied from 5.5% for a 1K pattern
database to 52.3% for a 128K pattern database, whereas the system time
overhead varies from 22.8% to 240.4%. Due to I/O interleaving, a
large percentage increase in the system time does not result in the
same increase in elapsed time. The increase in the elapsed time is
almost entirely due to the higher system time. This increase in
system time is due to the larger database sizes. The Oyster module
proved to scale well as the database size increased: a 128 times
increase in the database size from 1K to 128K patterns resulted in
elapsed time increase from 207.7 seconds to 299.9 seconds, a merely 44.4%
increase in scan times. For the same set of databases, ClamAV's
elapsed time increases from 225.4 seconds to 2,077.4 seconds-a
9.2 factor increase in scan times.
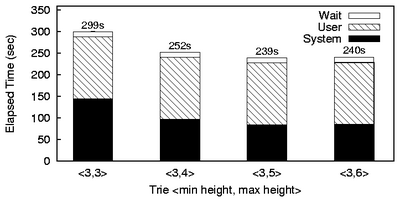 Figure 11: Am-Utils build times using the FULL/DEFERRED mode with a 128K signature database.
Figure 11: Am-Utils build times using the FULL/DEFERRED mode with a 128K signature database.
| Max Level | Mem Usage | D Time | Speed Gain |
| 3 | 45MB | 0s | 0s |
| 4 | 60MB | -45s | 45s |
| 5 | 182MB | -58s | 13s |
| 6 | 199MB | -57.5s | -0.5s |
Table 2: Effect of the maximum trie height parameter on speed and
memory usage. The speed gain column shows the speed improvement over the previous maximum trie level.
The scalability for larger databases can be further improved by
adjusting the minimum and maximum trie height parameters. We
configured Avfs to use the slowest mode, FULL/DEFERRED.
The Oyster module was configured to use a database of 128K virus signatures,
and a minimum height of three. We repeated the Am-Utils benchmark
with various maximum trie height parameters. Figure
11 shows the result of this
experiment. Table 2 summarizes improvements in
speed and increases in memory usage. A maximum height of five proved
to be the fastest, but a height of four provided a reasonable increase
in speed while using significantly less memory than a height of five.
A system administrator has a lot of flexibility in tuning the
performance of the system. If speed is very important, then a
maximum trie height of five can be used. However, if the memory
availability is tight, then a maximum trie height of four provides
a reasonable performance improvement with a smaller memory footprint
than a height of five.
6.5 Postmark Results
Figure 12 shows the results of running Postmark with on-access
scanners: ClamAV, H+BEDV, and all four modes of Avfs. It also shows the time
taken for a Postmark run on Ext3.
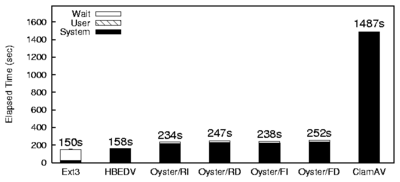 Figure 12: Postmark results. For Avfs, R represents REGULAR mode, F
FULL, I IMMEDIATE, and D DEFERRED.
Postmark is an I/O intensive benchmark, which creates a lot of files and
performs read and write operations on these files. The files are accessed at
random, which results in a file being opened and closed several times during
the benchmark.
When a file is created in Postmark, Avfs scans this file and creates a
state file for it. Once a state file is present, no additional scanning is required during
subsequent reads. Since all the writes are appends, the state in the state file is
always valid and only the last page(s) ahead of the current scanned page
are scanned. ClamAV's scanner is called several times on the open and close
system calls to scan entire files, which contributes to its overhead. The
slowest mode of Avfs, FULL/DEFERRED, takes about 252
seconds and Ext3 takes 150 seconds, which is an overhead of 68%.
For the same benchmark, ClamAV takes 1,487 seconds-a factor of 9.9 slower.
H+BEDV has a heuristics engine that allows it to determine if a file needs
to be checked for viruses by looking at the first few bytes in the file. This
allows H+BEDV to skip scanning entire files of types that cannot be infected. Although it is possible to
suppress the heuristics engine of H+BEDV in the command-line scanner, this
option is not available in the on-access scanner. Due to its heuristics
engine, H+BEDV shows almost identical performance to Ext3 with a 5% overhead in elapsed
time but the system time increases by a factor of 5.9.
Figure 12: Postmark results. For Avfs, R represents REGULAR mode, F
FULL, I IMMEDIATE, and D DEFERRED.
Postmark is an I/O intensive benchmark, which creates a lot of files and
performs read and write operations on these files. The files are accessed at
random, which results in a file being opened and closed several times during
the benchmark.
When a file is created in Postmark, Avfs scans this file and creates a
state file for it. Once a state file is present, no additional scanning is required during
subsequent reads. Since all the writes are appends, the state in the state file is
always valid and only the last page(s) ahead of the current scanned page
are scanned. ClamAV's scanner is called several times on the open and close
system calls to scan entire files, which contributes to its overhead. The
slowest mode of Avfs, FULL/DEFERRED, takes about 252
seconds and Ext3 takes 150 seconds, which is an overhead of 68%.
For the same benchmark, ClamAV takes 1,487 seconds-a factor of 9.9 slower.
H+BEDV has a heuristics engine that allows it to determine if a file needs
to be checked for viruses by looking at the first few bytes in the file. This
allows H+BEDV to skip scanning entire files of types that cannot be infected. Although it is possible to
suppress the heuristics engine of H+BEDV in the command-line scanner, this
option is not available in the on-access scanner. Due to its heuristics
engine, H+BEDV shows almost identical performance to Ext3 with a 5% overhead in elapsed
time but the system time increases by a factor of 5.9.
6.6 Scan Engine Evaluation
Our test consisted of scanning two large files, one with random data
and the other with data that contained executable code from library
files. None of the test files contained any viruses so the files were
completely scanned.
When a file is given to a command-line scanner for scanning, it needs
to set up the scanning trie before scanning can start. The time taken
to set up this trie depends on the size of the virus database, so we
used the same size database as the other scanner for Oyster. For
example, when comparing it to Sophos we used 86,755 patterns, because
that is what Sophos reports as their database size.
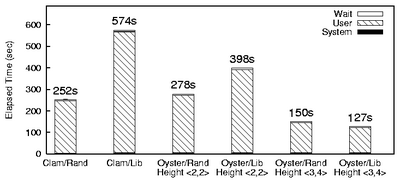 Figure 13: File scan times for Oyster and ClamAV. The database had 19,807 patterns.
Figure 13 compares the performance of ClamAV
with Oyster. We ran the benchmark for Oyster once with the minimum
and maximum heights set to two, and once with the heights set to 3 and
4, respectively. The < 2, 2 > setting matches the ClamAV
trie structure, and < 3, 4 > optimizes Oyster's
performance for this benchmark.
For the Oyster scanner configured with < 2, 2 > , the
random file scan was 26 seconds slower, while the library file scan
was 176 seconds faster than ClamAV. The Oyster scanner was faster for
the library scan because the internal state structure maintains
partially-matched patterns between successive calls to the scanner.
The ClamAV scanner does not have such a structure. Instead, it
rescans some of the text from the previous buffer so that patterns
that span multiple buffers are detected. In a library file scan,
ClamAV scanned a total of 6.2 billion patterns, while Oyster scanned
1.8% fewer patterns. In the random file benchmark, ClamAV again
scanned 1.8% more patterns. Even though the Oyster scanner scanned
six million fewer patterns, the overhead of maintaining the state,
which includes additional malloc calls and linked list
operations, exceeded the savings gained in scanning fewer patterns.
Increasing the trie height parameters to < 3, 4 > significantly
reduces the number of patterns scanned by Oyster. For the random file
benchmark, Oyster scanned 369 times fewer patterns. For the library
benchmark, Oyster scanned 52 times fewer patterns.
Figure 13: File scan times for Oyster and ClamAV. The database had 19,807 patterns.
Figure 13 compares the performance of ClamAV
with Oyster. We ran the benchmark for Oyster once with the minimum
and maximum heights set to two, and once with the heights set to 3 and
4, respectively. The < 2, 2 > setting matches the ClamAV
trie structure, and < 3, 4 > optimizes Oyster's
performance for this benchmark.
For the Oyster scanner configured with < 2, 2 > , the
random file scan was 26 seconds slower, while the library file scan
was 176 seconds faster than ClamAV. The Oyster scanner was faster for
the library scan because the internal state structure maintains
partially-matched patterns between successive calls to the scanner.
The ClamAV scanner does not have such a structure. Instead, it
rescans some of the text from the previous buffer so that patterns
that span multiple buffers are detected. In a library file scan,
ClamAV scanned a total of 6.2 billion patterns, while Oyster scanned
1.8% fewer patterns. In the random file benchmark, ClamAV again
scanned 1.8% more patterns. Even though the Oyster scanner scanned
six million fewer patterns, the overhead of maintaining the state,
which includes additional malloc calls and linked list
operations, exceeded the savings gained in scanning fewer patterns.
Increasing the trie height parameters to < 3, 4 > significantly
reduces the number of patterns scanned by Oyster. For the random file
benchmark, Oyster scanned 369 times fewer patterns. For the library
benchmark, Oyster scanned 52 times fewer patterns.
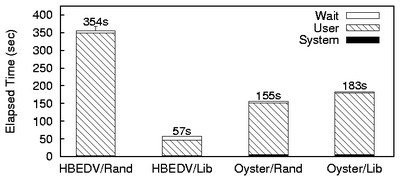 Figure 14: File scan times for Oyster and H+BEDV. The database had 66,393 patterns.
Figure 14 compares H+BEDV with Oyster. In this
benchmark, we ran the command-line scanner from H+BEDV. We configured
H+BEDV so that it scans all input without the heuristics engine.
H+BEDV is slower with random input than with the library file. This
suggests that the commercial H+BEDV scan engine is optimized to scan
executable content, possibly by using a different scanning mechanism.
The random file scan of H+BEDV is 6.2 times slower than H+BEDV's scan
of the library file. For 1GB of random input, Oyster is 56% faster
than H+BEDV. For a 1GB library file however, Oyster is 3.2 times
slower than H+BEDV.
Figure 14: File scan times for Oyster and H+BEDV. The database had 66,393 patterns.
Figure 14 compares H+BEDV with Oyster. In this
benchmark, we ran the command-line scanner from H+BEDV. We configured
H+BEDV so that it scans all input without the heuristics engine.
H+BEDV is slower with random input than with the library file. This
suggests that the commercial H+BEDV scan engine is optimized to scan
executable content, possibly by using a different scanning mechanism.
The random file scan of H+BEDV is 6.2 times slower than H+BEDV's scan
of the library file. For 1GB of random input, Oyster is 56% faster
than H+BEDV. For a 1GB library file however, Oyster is 3.2 times
slower than H+BEDV.
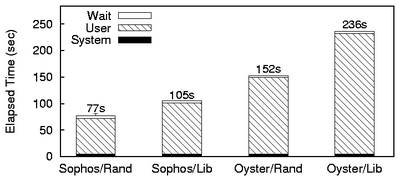 Figure 15: File scan times for Oyster and Sophos. The database had 86,755 patterns.
Figure 15 compares Sophos, an optimized
commercial product, with Oyster. Oyster is slower by 97% for random
input and by 124% for the library file, suggesting that Oyster can be
further optimized in the future.
Figure 15: File scan times for Oyster and Sophos. The database had 86,755 patterns.
Figure 15 compares Sophos, an optimized
commercial product, with Oyster. Oyster is slower by 97% for random
input and by 124% for the library file, suggesting that Oyster can be
further optimized in the future.
7 Conclusions
The main contribution of our work is that for the first time, to the
best of our knowledge, we have implemented a true on-access
state-oriented anti-virus solution that scans input files for viruses
on reads and writes.
- Avfs intercepts file access operations (including memory-mapped I/O)
at the VFS level unlike other on-access systems that intercept the
open, close, and exec system calls.
Scanning during read and write operations reduces the possibility of a
virus attack and can trap viruses before they are written to disk. In
addition to providing data consistency by backing up files, the
forensic modes of operation in Avfs provide means to track malicious
activity by recording information about malicious processes.
-
Our Oyster scan engine improves the performance of the
pattern-matching algorithm using variable trie heights, and scales
efficiently for large database sizes. State-based scanning in
Oyster allows us to scan a buffer of data in parts. This
state-oriented design reduces the amount of scanning required
by performing partial file-scanning.
-
By separating the file system (Avfs) from the scan-engine (Oyster), we
have made the system flexible and extensible, allowing third-party virus scanners to be
integrated into our system.
7.1 Future Work
We plan to improve the Oyster scanning engine in a variety of ways.
Oyster scans all files, even those that are not executable. We plan
to allow Oyster to scan for viruses within only specific file types.
For example, when scanning a Microsoft Office document, Oyster will scan only
for macro viruses.
Since some viruses can only occur in certain segments of a file,
it is not necessary to scan for them in the rest of the file. We plan
to integrate positional matching into Oyster, so that only relevant
portions of files are scanned.
Also, we plan to scan for all patterns on a leaf node of the scanning
trie simultaneously instead of scanning for each pattern sequentially,
thereby improving the scan engines performance.
We plan to maintain Avfs state for more than one page per file. These
states can be used to scan for multi-part patterns efficiently even during
random writes. Our investigation will evaluate trade-offs between
storing more and less state information.
We plan to add more forensic features to the deferred mode, such as
terminating the offending processes, and storing the core dump of the
process along with other useful evidence of malicious activity.
We also plan to integrate a versioning engine [12]
with Avfs to support multiple levels of versioning. We can keep
track of changes to a file across several versions to provide more
accurate forensics.
The Oyster scan engine can also be applied to generic pattern
matching. Rather than using a database of viruses, Oyster could use a
database of keywords. For example, a brokerage firm could flag files
for review by a compliance officer. Other companies could flag keywords
related to trade secrets. We plan to investigate what file system
policies would be useful for such applications.
8 Acknowledgments
We thank the Usenix Security reviewers for the valuable feedback they
provided.
We also thank the ClamAV developers for providing an open source virus
scanner and for their useful comments during the development of
Oyster.
This work was partially made possible by an NSF CAREER award
EIA-0133589, NSF Trusted Computing award CCR-0310493, and HP/Intel
gift numbers 87128 and 88415.1.
References
- [1]
-
A. V. Aho and M. J. Corasick.
Efficient string matching: an aid to bibliographic search.
Communications of the ACM, 18(6):333-340, June 1975.
- [2]
-
A. Aranya, C. P. Wright, and E. Zadok.
Tracefs: A File System to Trace Them All.
In Proceedings of the Third USENIX Conference on File and
Storage Technologies (FAST 2004), pages 129-143, San Francisco, CA,
March/April 2004.
- [3]
-
F. Cohen.
Computer viruses: theory and experiments.
Computers and Security, 6(1):22-35, 1987.
- [4]
-
Computer Associates.
eTrust.
www3.ca.com/Solutions, 2004.
- [5]
-
D. Ellard and M. Seltzer.
NFS Tricks and Benchmarking Traps.
In Proceedings of the Annual USENIX Technical Conference,
FREENIX Track, pages 101-114, June 2003.
- [6]
-
H+BEDV Datentechnik GmbH.
Dazuko.
www.dazuko.org, 2004.
- [7]
-
H+BEDV Datentechnik GmbH.
H+BEDV.
www.hbedv.com, 2004.
- [8]
-
J. Elson and A. Cerpa.
Internet Content Adaptation Protocol (ICAP).
Technical Report RFC 3507, Network Working Group, April 2003.
- [9]
-
Kaspersky Lab.
Kaspersky.
www.kaspersky.com, 2004.
- [10]
-
J. Katcher.
PostMark: a New Filesystem Benchmark.
Technical Report TR3022, Network Appliance, 1997.
www.netapp.com/tech_library/3022.html.
- [11]
-
T. Kojm.
ClamAV.
www.clamav.net, 2004.
- [12]
-
K. Muniswamy-Reddy, C. P. Wright, A. Himmer, and E. Zadok.
A Versatile and User-Oriented Versioning File System.
In Proceedings of the Third USENIX Conference on File and
Storage Technologies (FAST 2004), pages 115-128, San Francisco, CA,
March/April 2004.
- [13]
-
Network Associates Technology, Inc.
McAfee.
www.mcafee.com, 2004.
- [14]
-
J. S. Pendry, N. Williams, and E. Zadok.
Am-utils User Manual, 6.1b3 edition, July 2003.
www.am-utils.org.
- [15]
-
J. Reynolds.
The Helminthiasis of the Internet.
Technical Report RFC 1135, Internet Activities Board, December
1989.
- [16]
-
R. Richardson.
Computer Crime and Security Survey.
Computer Security Institute, VIII(1):1-21, 2003.
www.gocsi.com/press/20030528.html.
- [17]
-
Sophos.
Sophos Plc.
www.sophos.com, 2004.
- [18]
-
Symantec.
Norton Antivirus.
www.symantec.com, 2004.
- [19]
-
E. Zadok and J. Nieh.
FiST: A Language for Stackable File Systems.
In Proceedings of the Annual USENIX Technical Conference, pages
55-70, June 2000.
Footnotes:
1Appears in the proceedings of the 13th USENIX Security Symposium (Security 2004)
File translated from
TEX
by
TTH,
version 3.68.
On 13 Jul 2005, 12:48.